Mūsdienu mīkstie roboti nākotnē var kļūt par nozīmīgiem palīgiem enerģētikā, rūpniecībā un medicīnā, taču tam nepieciešama pavisam citāda uzbūve. Tie nevar paļauties uz bieziem kabeļiem, cietām platēm vai lielām baterijām, jo tas ierobežo to elastību. Tāpēc arvien vairāk zinātnieku meklē risinājumus, kas atgādina dzīvu organismu, nevis klasisku mašīnu.
Mīksts korpuss kā smadzenes, muskuļi un nervi vienlaikus
Šādā vīzijā sensori, kustība un enerģijas avots ir apvienoti vienā mīkstā ķermenī – gluži kā muskuļi un nervu tīkls dzīvos organismos. Šo pieeju dēvē par iemiesoto jeb iekļauto inteliģenci, jo daļa vadības funkciju ir burtiski ieaustas robota struktūrā. Jo vairāk robots spēj sajust un reaģēt ar paša ķermeņa starpniecību, jo mazāk tam nepieciešamas ārējas vadības un palīgsistēmas.
Singapūras zinātnieki sper soli tuvāk jaunam risinājumam
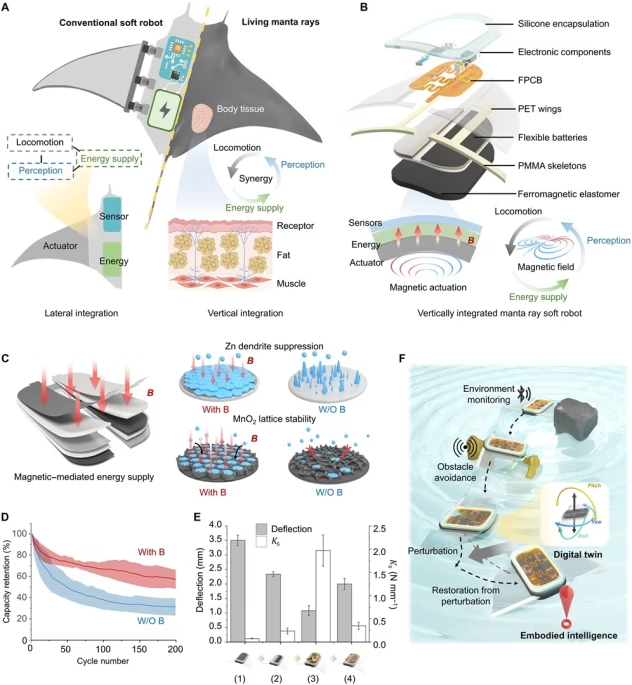
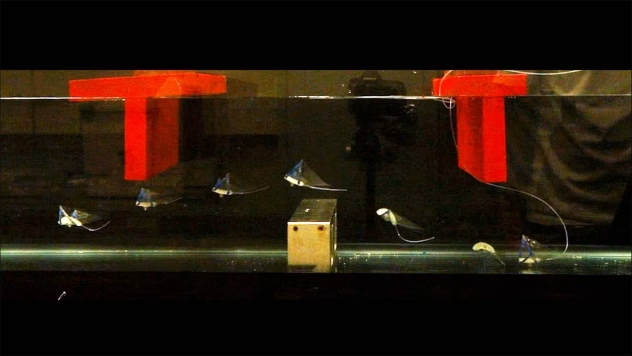
Šai idejai īpaši pietuvojušies Nacionālās Singapūras universitātes pētnieki. Viņi izveidojuši mīkstu robotu, kura forma iedvesmota no rajas, un tas pārvietojas ūdenī, izmantojot magnētiskos laukus. Būtiski ir tas, ka tie paši magnētiskie lauki palīdz arī robota elastīgajām baterijām darboties ilgāk un stabilāk.





Magnētiskā kustība un enerģijas avota stabilitāte
Žurnālā Science Advances publicētais pētījums parādīja, ka magnētiskajiem laukiem robota darbībā ir dubulta nozīme. Tie iedarbina robota “spārnus” un vienlaikus stabilizē elektrokīmiskos procesus baterijā. Tādējādi enerģijas avots paliek uzticams pat tad, ja robota ķermenis ūdenī spēcīgi lokās un viļņojas.
Robotā izmantotas cinka un mangāna baterijas ar mangāna(IV) oksīdu kā katoda materiālu. Šāda ķīmija parasti ir lētāka un drošāka nekā litija jonu baterijas, taču biežas uzlādes apstākļos tā mēdz ātrāk nolietoties. Magnētiskā lauka ietekme mazina šo trūkumu – baterija ilgāk saglabā savu sākotnējo ietilpību.
Kā baterijas iekļāva mīkstajā ķermenī?

Nacionālās Singapūras universitātes pētnieku komanda ievietoja bateriju elementus mīkstā silikonā un salika tos robota iekšienē vertikālās “šķērssvītrās”. Tādējādi robota augšpusē un sānos palika vieta mīkstajiem “motoriem” un sensoriem, vienlaikus saglabājot visu ķermeni plānu un elastīgu. Tā kā cieto detaļu ir ļoti maz, robots ūdenī spēj viļņoties gandrīz tikpat brīvi kā īsta zivs.
Robota “spārni” izgatavoti no magnētiskiem elastomēriem. Tos ritmiski izkustina apkārt izvietotas spoles, kas rada mainīgu magnētisko lauku. Tas pats lauks šķērso arī bateriju elementu bloku un saudzīgi virza jonu kustību baterijas iekšienē. Pēc divsimt uzlādes cikliem baterija saglabāja apmēram 57% no sākotnējās ietilpības – gandrīz divkārt vairāk nekā bez magnētiskā lauka iedarbības.
Ko tas nozīmē mīksto robotu nākotnei?
Fizikālais skaidrojums ir salīdzinoši vienkāršs: magnētiskais lauks izlīdzina cinka jonu plūsmu un neļauj tiem veidot bīstamas adatai līdzīgas struktūras. Vienlaikus nostiprinās katoda kristālrežģis, tāpēc nolietojums palēninās un enerģijas zudumi samazinās. Pētījuma autori šo risinājumu dēvē par dubulto magnētiski–elektrokīmisko stabilizāciju, jo efekts izpaužas gan anodā, gan katodā.






Pašlaik šāds robots spēj peldēt tikai kontrolētos izmēģinājumu baseinos, kur to ieskauj jaudīgi ārējie magnēti. Tomēr pieeja ir daudzsološa, jo tieši tas pats spēks, kas liek robotam kustēties, palīdz uzturēt arī tā enerģijas rezerves. Nākotnē mīkstie roboti varētu būt tuvāki gudriem audiem, nevis klasiskām mehāniskām ierīcēm. Zinātnieki plāno piemērot šo metodi arī citām bateriju ķīmijām un enerģiju uzkrājošiem šķiedru materiāliem, lai kustība, uztvere un barošana saplūstu vienotā veselumā.